
Gunakan Generic Sensor API untuk mendapatkan akses ke sensor di perangkat seperti akselerometer, giroskop, dan magnetometer.


Saat ini, data sensor digunakan di banyak aplikasi khusus platform untuk memungkinkan kasus penggunaan seperti game imersif, pelacakan kebugaran, dan augmented reality atau virtual reality. Bukankah akan keren jika kita menjembatani kesenjangan antara aplikasi web dan aplikasi khusus platform? Masukkan Generic Sensor API, untuk web.
Apa itu Generic Sensor API?
Generic Sensor API adalah sekumpulan antarmuka yang mengekspos
perangkat sensor ke platform web. API ini terdiri dari antarmuka dasar
Sensor dan serangkaian kelas sensor
konkret yang dibangun di atasnya. Memiliki antarmuka dasar menyederhanakan proses penerapan dan spesifikasi untuk class sensor konkret. Misalnya, lihat class
Gyroscope. Sangat kecil! Fungsi
inti ditentukan oleh antarmuka dasar, dan Gyroscope hanya memperluasnya dengan tiga
atribut yang merepresentasikan kecepatan sudut.
Beberapa class sensor berinteraksi dengan sensor hardware sebenarnya seperti, misalnya, class akselerometer atau
giroskop. Sensor ini disebut sebagai sensor tingkat rendah. Sensor lain, yang disebut sebagai
sensor gabungan, menggabungkan data dari beberapa sensor
tingkat rendah untuk mengekspos informasi yang seharusnya dihitung oleh skrip. Misalnya, sensor
AbsoluteOrientation
menyediakan matriks rotasi empat kali empat yang siap digunakan berdasarkan data yang diperoleh dari
akselerometer, giroskop, dan magnetometer.
Anda mungkin berpikir bahwa platform web sudah menyediakan data sensor dan Anda benar! Misalnya, peristiwa
DeviceMotion dan
DeviceOrientation
mengekspos data sensor gerakan. Jadi, mengapa kita memerlukan API baru?
Dibandingkan dengan antarmuka yang ada, Generic Sensor API memberikan sejumlah keuntungan:
- Generic Sensor API adalah framework sensor yang dapat dengan mudah diperluas dengan class sensor baru dan setiap class ini akan mempertahankan antarmuka generik. Kode klien yang ditulis untuk satu jenis sensor dapat digunakan kembali untuk jenis sensor lain dengan sedikit modifikasi.
- Anda dapat mengonfigurasi sensor. Misalnya, Anda dapat menetapkan frekuensi pengambilan sampel yang sesuai dengan kebutuhan aplikasi Anda.
- Anda dapat mendeteksi apakah sensor tersedia di platform.
- Pembacaan sensor memiliki stempel waktu presisi tinggi, sehingga memungkinkan sinkronisasi yang lebih baik dengan aktivitas lain di aplikasi Anda.
- Model data sensor dan sistem koordinat didefinisikan dengan jelas, sehingga memungkinkan vendor browser menerapkan solusi yang dapat dioperasikan.
- Antarmuka berbasis Generic Sensor tidak terikat ke DOM (artinya, antarmuka tersebut bukan objek
navigatormaupunwindow), dan hal ini membuka peluang penggunaan API dalam pekerja layanan atau penerapannya di runtime JavaScript tanpa antarmuka, seperti perangkat tersemat. - Aspek keamanan dan privasi adalah prioritas utama untuk Generic Sensor API dan memberikan keamanan yang jauh lebih baik dibandingkan dengan API sensor lama. Ada integrasi dengan Permissions API.
- Sinkronisasi otomatis dengan koordinat layar tersedia untuk
Accelerometer,Gyroscope,LinearAccelerationSensor,AbsoluteOrientationSensor,RelativeOrientationSensor, danMagnetometer.
API sensor generik yang tersedia
Pada saat penulisan, ada beberapa sensor yang dapat Anda coba.
Sensor gerakan:
AccelerometerGyroscopeLinearAccelerationSensorAbsoluteOrientationSensorRelativeOrientationSensorGravitySensor
Sensor lingkungan:
AmbientLightSensor(Di balik tanda#enable-generic-sensor-extra-classesdi Chromium.)Magnetometer(Di balik tanda#enable-generic-sensor-extra-classesdi Chromium.)
Deteksi fitur
Deteksi fitur API hardware rumit, karena Anda perlu mendeteksi apakah browser mendukung antarmuka yang dimaksud, dan apakah perangkat memiliki sensor yang sesuai. Memeriksa
apakah browser mendukung antarmuka sangat mudah. (Ganti Accelerometer dengan salah satu
antarmuka lain yang disebutkan di atas.)
if ('Accelerometer' in window) {
// The `Accelerometer` interface is supported by the browser.
// Does the device have an accelerometer, though?
}
Untuk mendapatkan hasil deteksi fitur yang benar-benar bermakna, Anda juga perlu mencoba menghubungkan ke sensor. Contoh ini menunjukkan cara melakukannya.
let accelerometer = null;
try {
accelerometer = new Accelerometer({ frequency: 10 });
accelerometer.onerror = (event) => {
// Handle runtime errors.
if (event.error.name === 'NotAllowedError') {
console.log('Permission to access sensor was denied.');
} else if (event.error.name === 'NotReadableError') {
console.log('Cannot connect to the sensor.');
}
};
accelerometer.onreading = (e) => {
console.log(e);
};
accelerometer.start();
} catch (error) {
// Handle construction errors.
if (error.name === 'SecurityError') {
console.log('Sensor construction was blocked by the Permissions Policy.');
} else if (error.name === 'ReferenceError') {
console.log('Sensor is not supported by the User Agent.');
} else {
throw error;
}
}
Polyfill
Untuk browser yang tidak mendukung Generic Sensor API, tersedia polyfill. Polyfill memungkinkan Anda memuat hanya implementasi sensor yang relevan.
// Import the objects you need.
import { Gyroscope, AbsoluteOrientationSensor } from './src/motion-sensors.js';
// And they're ready for use!
const gyroscope = new Gyroscope({ frequency: 15 });
const orientation = new AbsoluteOrientationSensor({ frequency: 60 });
Apa saja sensor ini? Bagaimana cara menggunakannya?
Sensor adalah area yang mungkin memerlukan pengantar singkat. Jika sudah memahami sensor, Anda dapat langsung membuka bagian coding praktik. Jika tidak, mari kita lihat setiap sensor yang didukung secara mendetail.
Akselerometer dan sensor akselerasi linier
Sensor Accelerometer mengukur akselerasi perangkat yang menghosting sensor pada tiga sumbu (X, Y, dan Z). Sensor ini adalah sensor inersia, yang berarti bahwa saat perangkat dalam jatuh bebas linear, total percepatan yang diukur adalah 0 m/s2, dan saat perangkat tergeletak di atas meja, percepatan ke arah atas (sumbu Z) akan sama dengan gravitasi Bumi, yaitu g ≈ +9,8 m/s2 karena mengukur gaya meja yang mendorong perangkat ke atas. Jika Anda mendorong perangkat ke
kanan, akselerasi pada sumbu X akan positif, atau negatif jika perangkat berakselerasi dari
kanan ke kiri.
Akselerometer dapat digunakan untuk hal-hal seperti: penghitungan langkah, penginderaan gerakan, atau orientasi perangkat sederhana. Sering kali, pengukuran akselerometer digabungkan dengan data dari sumber lain untuk membuat sensor gabungan, seperti sensor orientasi.
LinearAccelerationSensor
mengukur akselerasi yang diterapkan pada perangkat yang menghosting sensor, tidak termasuk kontribusi
gravitasi. Saat perangkat dalam keadaan diam, misalnya tergeletak datar di atas meja, sensor akan mengukur percepatan ≈ 0 m/s2 pada tiga sumbu.
Sensor gravitasi
Pengguna sudah dapat memperoleh pembacaan yang mendekati pembacaan sensor gravitasi secara manual dengan
memeriksa pembacaan Accelerometer dan LinearAccelerometer secara manual, tetapi hal ini bisa merepotkan
dan bergantung pada akurasi nilai yang diberikan oleh sensor tersebut. Platform seperti Android dapat memberikan pembacaan gravitasi sebagai bagian dari sistem operasi, yang seharusnya lebih murah dalam hal komputasi, memberikan nilai yang lebih akurat bergantung pada hardware pengguna, dan lebih mudah digunakan dalam hal ergonomi API. GravitySensor menampilkan efek percepatan di sepanjang sumbu X, Y, dan Z perangkat karena gravitasi.
Giroskop
Sensor Gyroscope mengukur kecepatan sudut dalam radian per detik di sekitar sumbu X, Y, dan Z lokal perangkat. Sebagian besar perangkat konsumen memiliki giroskop mekanis (MEMS), yang merupakan sensor inersia yang mengukur kecepatan rotasi berdasarkan gaya Coriolis inersia. Giroskop MEMS rentan
terhadap penyimpangan yang disebabkan oleh sensitivitas gravitasi sensor yang mendeformasi sistem mekanis internal sensor. Giroskop berosilasi pada frekuensi tinggi relatif, misalnya, 10-an kHz, dan
oleh karena itu, mungkin menggunakan lebih banyak daya dibandingkan sensor lainnya.
Sensor orientasi
AbsoluteOrientationSensor
adalah sensor gabungan yang mengukur rotasi perangkat dalam kaitannya dengan sistem koordinat Bumi,
sementara
RelativeOrientationSensor
memberikan data yang merepresentasikan rotasi perangkat yang menghosting sensor gerakan dalam kaitannya dengan sistem koordinat referensi yang tetap.
Semua framework JavaScript 3D modern mendukung kuaternion
dan matriks rotasi untuk merepresentasikan rotasi;
namun, jika Anda menggunakan WebGL secara langsung, OrientationSensor memiliki
properti quaternion
dan
metode populateMatrix().
Berikut beberapa cuplikannya:
let torusGeometry = new THREE.TorusGeometry(7, 1.6, 4, 3, 6.3);
let material = new THREE.MeshBasicMaterial({ color: 0x0071c5 });
let torus = new THREE.Mesh(torusGeometry, material);
scene.add(torus);
// Update mesh rotation using quaternion.
const sensorAbs = new AbsoluteOrientationSensor();
sensorAbs.onreading = () => torus.quaternion.fromArray(sensorAbs.quaternion);
sensorAbs.start();
// Update mesh rotation using rotation matrix.
const sensorRel = new RelativeOrientationSensor();
let rotationMatrix = new Float32Array(16);
sensor_rel.onreading = () => {
sensorRel.populateMatrix(rotationMatrix);
torus.matrix.fromArray(rotationMatrix);
};
sensorRel.start();
const mesh = new BABYLON.Mesh.CreateCylinder('mesh', 0.9, 0.3, 0.6, 9, 1, scene);
const sensorRel = new RelativeOrientationSensor({ frequency: 30 });
sensorRel.onreading = () => mesh.rotationQuaternion.FromArray(sensorRel.quaternion);
sensorRel.start();
// Initialize sensor and update model matrix when new reading is available.
let modMatrix = new Float32Array([1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1]);
const sensorAbs = new AbsoluteOrientationSensor({ frequency: 60 });
sensorAbs.onreading = () => sensorAbs.populateMatrix(modMatrix);
sensorAbs.start();
// Somewhere in rendering code, update vertex shader attribute for the model
gl.uniformMatrix4fv(modMatrixAttr, false, modMatrix);
Sensor orientasi memungkinkan berbagai kasus penggunaan, seperti game imersif, augmented reality, dan virtual reality.
Untuk mengetahui informasi selengkapnya tentang sensor gerakan, kasus penggunaan lanjutan, dan persyaratan, lihat dokumen penjelasan sensor gerakan.
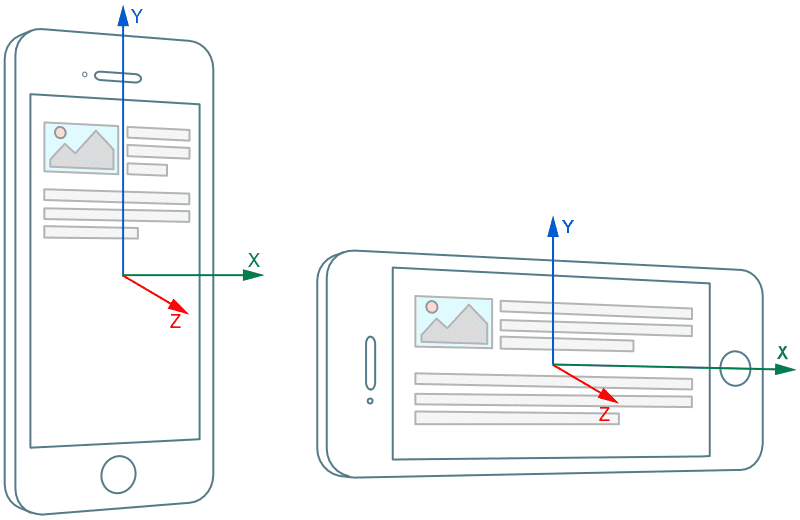
Sinkronisasi dengan koordinat layar
Secara default, pembacaan sensor spasial diselesaikan dalam sistem koordinat lokal yang terikat ke perangkat dan tidak memperhitungkan orientasi layar.
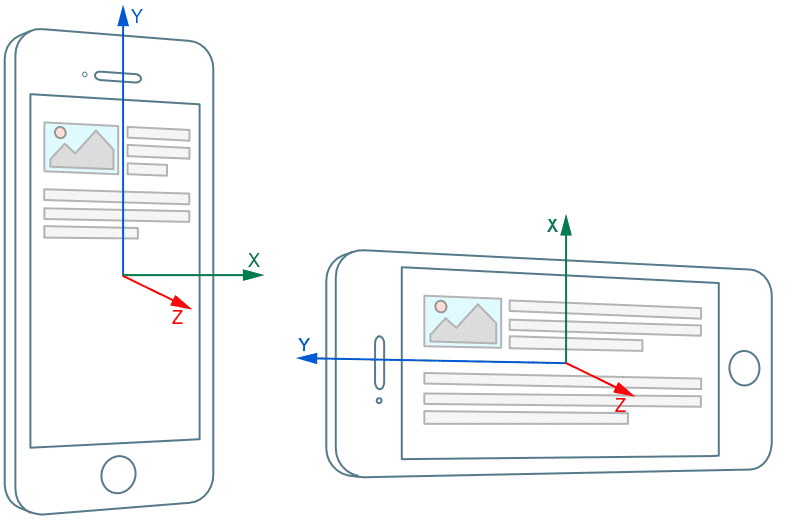
Namun, banyak kasus penggunaan seperti game atau augmented reality dan virtual reality memerlukan pembacaan sensor yang diselesaikan dalam sistem koordinat yang terikat pada orientasi layar.
Sebelumnya, pemetaan ulang pembacaan sensor ke koordinat layar harus diterapkan di JavaScript. Pendekatan ini tidak efisien dan juga meningkatkan kompleksitas kode aplikasi web secara signifikan; aplikasi web harus memantau perubahan orientasi layar dan melakukan transformasi koordinat untuk pembacaan sensor, yang bukan hal sepele untuk dilakukan pada sudut Euler atau kuaternion.
Generic Sensor API memberikan solusi yang jauh lebih sederhana dan andal. Sistem koordinat lokal dapat dikonfigurasi untuk semua class sensor spasial yang ditentukan: Accelerometer, Gyroscope, LinearAccelerationSensor, AbsoluteOrientationSensor, RelativeOrientationSensor, dan Magnetometer. Dengan meneruskan opsi referenceFrame ke konstruktor objek sensor, pengguna
menentukan apakah pembacaan yang ditampilkan akan diselesaikan dalam koordinat
perangkat atau
layar.
// Sensor readings are resolved in the Device coordinate system by default.
// Alternatively, could be RelativeOrientationSensor({referenceFrame: "device"}).
const sensorRelDevice = new RelativeOrientationSensor();
// Sensor readings are resolved in the Screen coordinate system. No manual remapping is required!
const sensorRelScreen = new RelativeOrientationSensor({ referenceFrame: 'screen' });
Mari kita mulai coding!
Generic Sensor API sangat sederhana dan mudah digunakan. Antarmuka Sensor memiliki metode
start() dan
stop() untuk mengontrol status sensor dan beberapa
pemroses peristiwa untuk menerima notifikasi tentang aktivasi sensor, error, dan pembacaan
yang baru tersedia. Class sensor konkret biasanya menambahkan atribut pembacaan spesifiknya ke class
dasar.
Lingkungan pengembangan
Selama pengembangan, Anda dapat menggunakan sensor melalui localhost. Jika Anda mengembangkan aplikasi untuk perangkat seluler, siapkan penerusan port untuk server lokal Anda, dan Anda siap untuk memulai!
Setelah kode Anda siap, deploy di server yang mendukung HTTPS. GitHub Pages ditayangkan melalui HTTPS, sehingga menjadi tempat yang tepat untuk membagikan demo Anda.
Rotasi model 3D
Dalam contoh sederhana ini, kita menggunakan data dari sensor orientasi absolut untuk mengubah quaternion rotasi model 3D. model adalah instance class three.js
Object3D yang memiliki properti
quaternion. Cuplikan kode berikut dari demo orientasi ponsel, mengilustrasikan cara menggunakan sensor orientasi absolut untuk memutar model 3D.
function initSensor() {
sensor = new AbsoluteOrientationSensor({ frequency: 60 });
sensor.onreading = () => model.quaternion.fromArray(sensor.quaternion);
sensor.onerror = (event) => {
if (event.error.name == 'NotReadableError') {
console.log('Sensor is not available.');
}
};
sensor.start();
}
Orientasi perangkat akan tercermin dalam rotasi 3D model dalam adegan WebGL.

Punchmeter
Cuplikan kode berikut diekstrak dari demo punchmeter, yang menunjukkan cara menggunakan sensor akselerasi linear untuk menghitung kecepatan maksimum perangkat dengan asumsi bahwa perangkat awalnya dalam keadaan diam.
this.maxSpeed = 0;
this.vx = 0;
this.ax = 0;
this.t = 0;
/* … */
this.accel.onreading = () => {
let dt = (this.accel.timestamp - this.t) * 0.001; // In seconds.
this.vx += ((this.accel.x + this.ax) / 2) * dt;
let speed = Math.abs(this.vx);
if (this.maxSpeed < speed) {
this.maxSpeed = speed;
}
this.t = this.accel.timestamp;
this.ax = this.accel.x;
};
Kecepatan saat ini dihitung sebagai perkiraan integral fungsi percepatan.
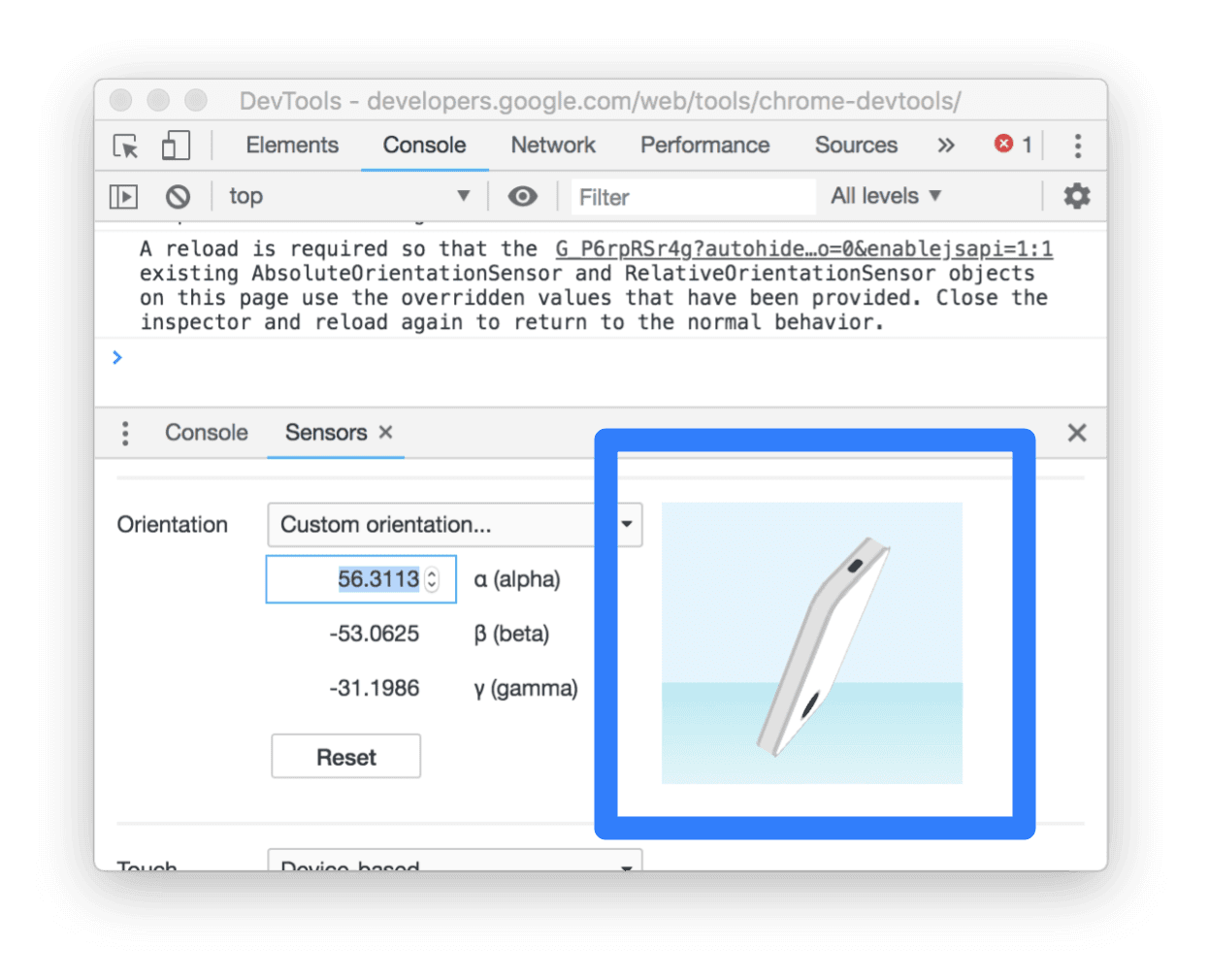
Proses debug dan penggantian sensor dengan Chrome DevTools
Dalam beberapa kasus, Anda tidak memerlukan perangkat fisik untuk menggunakan Generic Sensor API. Chrome DevTools memiliki dukungan yang sangat baik untuk mensimulasikan orientasi perangkat.
Privasi dan keamanan
Pembacaan sensor adalah data sensitif yang dapat menjadi sasaran berbagai serangan dari halaman web berbahaya. Penerapan Generic Sensor API menerapkan beberapa batasan untuk memitigasi kemungkinan risiko keamanan dan privasi. Batasan ini harus diperhitungkan oleh developer yang ingin menggunakan API, jadi mari kita daftarkan secara singkat.
Khusus HTTPS
Karena Generic Sensor API adalah fitur yang canggih, browser hanya mengizinkannya dalam konteks yang aman. Dalam praktiknya, berarti untuk menggunakan Generic Sensor API, Anda harus mengakses halaman melalui HTTPS. Selama pengembangan, Anda dapat melakukannya melalui http://localhost, tetapi untuk produksi, Anda harus mengaktifkan HTTPS di server Anda. Lihat koleksi Aman dan terlindungi untuk mengetahui praktik terbaik dan panduan.
Integrasi Permissions Policy
Integrasi Permissions Policy di Generic Sensor API mengontrol akses ke data sensor untuk frame.
Secara default, objek Sensor hanya dapat dibuat dalam frame utama atau subframe dengan origin yang sama,
sehingga mencegah iframe lintas origin membaca data sensor tanpa izin. Perilaku default ini
dapat diubah dengan mengaktifkan atau menonaktifkan secara eksplisit
fitur yang dikontrol kebijakan yang sesuai.
Cuplikan di bawah menggambarkan pemberian akses data akselerometer ke iframe lintas origin, yang berarti
bahwa objek Accelerometer atau LinearAccelerationSensor kini dapat dibuat di sana.
<iframe src="https://third-party.com" allow="accelerometer" />
Pengiriman data sensor dapat ditangguhkan
Pembacaan sensor hanya dapat diakses oleh halaman web yang terlihat, yaitu saat pengguna benar-benar berinteraksi dengannya. Selain itu, data sensor tidak akan diberikan ke frame induk jika fokus pengguna berubah ke subframe lintas origin. Tindakan ini mencegah frame induk menyimpulkan input pengguna.
Apa langkah selanjutnya?
Ada serangkaian class sensor yang telah ditentukan dan akan diterapkan dalam waktu dekat seperti Sensor Cahaya Sekitar atau Sensor Kedekatan; namun, berkat kemampuan ekstensibilitas yang luar biasa dari framework Sensor Generik, kita dapat mengantisipasi munculnya lebih banyak class baru yang merepresentasikan berbagai jenis sensor.
Area penting lainnya untuk pekerjaan mendatang adalah peningkatan kualitas Generic Sensor API itu sendiri. Spesifikasi Generic Sensor saat ini merupakan Rekomendasi Kandidat, yang berarti masih ada waktu untuk melakukan perbaikan dan menghadirkan fungsi baru yang dibutuhkan developer.
Anda dapat membantu.
Spesifikasi sensor mencapai tingkat kematangan Rekomendasi Kandidat, sehingga masukan dari developer web dan browser sangat dihargai. Beri tahu kami fitur apa yang sebaiknya ditambahkan atau jika ada hal yang ingin Anda ubah dalam API saat ini.
Jangan ragu untuk mengajukan masalah spesifikasi serta bug untuk penerapan Chrome.
Resource
- Project demo: https://w3c.github.io/generic-sensor-demos/
- Spesifikasi Generic Sensor API: https://w3c.github.io/sensors/
- Masalah spesifikasi: https://github.com/w3c/sensors/issues
- Milis grup kerja W3C: public-device-apis@w3.org
- Status Fitur Chrome: https://www.chromestatus.com/feature/5698781827825664
- Bug penerapan: http://crbug.com?q=component:Blink>Sensor
Ucapan terima kasih
Artikel ini ditinjau oleh Joe Medley dan Kayce Basques.