
일반 센서 API를 사용하여 가속도계, 자이로스코프, 자기계와 같은 온디바이스 센서에 액세스합니다.


오늘날 센서 데이터는 몰입형 게임, 피트니스 추적, 증강 현실 또는 가상 현실과 같은 사용 사례를 지원하기 위해 많은 플랫폼별 애플리케이션에서 사용됩니다. 플랫폼별 애플리케이션과 웹 애플리케이션 간의 격차를 해소하는 것이 좋지 않나요? 웹용 일반 센서 API를 입력합니다.
일반 센서 API란 무엇인가요?
일반 센서 API는 센서 기기를 웹 플랫폼에 노출하는 인터페이스 집합입니다. API는 기본 Sensor 인터페이스와 이를 기반으로 빌드된 구체적인 센서 클래스 집합으로 구성됩니다. 기본 인터페이스가 있으면 구체적인 센서 클래스의 구현 및 사양 프로세스가 간소화됩니다. 예를 들어 Gyroscope 클래스를 살펴보세요. 정말 작습니다. 핵심 기능은 기본 인터페이스로 지정되며 Gyroscope는 각속도를 나타내는 세 가지 속성으로만 확장됩니다.
일부 센서 클래스는 실제 하드웨어 센서(예: 가속도계 또는 자이로스코프 클래스)와 인터페이스합니다. 이를 하위 수준 센서라고 합니다. 융합 센서라고 하는 다른 센서는 여러 하위 수준 센서의 데이터를 병합하여 스크립트에서 계산해야 하는 정보를 노출합니다. 예를 들어 AbsoluteOrientation 센서는 가속도계, 자이로스코프, 자기계에서 얻은 데이터를 기반으로 바로 사용할 수 있는 4x4 회전 행렬을 제공합니다.
웹 플랫폼에서 이미 센서 데이터를 제공한다고 생각할 수 있으며, 이는 사실입니다. 예를 들어 DeviceMotion 및 DeviceOrientation 이벤트는 동작 센서 데이터를 노출합니다. 그렇다면 새로운 API가 필요한 이유는 무엇일까요?
기존 인터페이스와 비교할 때 일반 센서 API는 다음과 같은 많은 이점을 제공합니다.
- 일반 센서 API는 새로운 센서 클래스로 쉽게 확장할 수 있는 센서 프레임워크이며 이러한 각 클래스는 일반 인터페이스를 유지합니다. 한 센서 유형에 맞게 작성된 클라이언트 코드를 약간만 수정하여 다른 센서 유형에 재사용할 수 있습니다.
- 센서를 구성할 수 있습니다. 예를 들어 애플리케이션 요구사항에 적합한 샘플링 빈도를 설정할 수 있습니다.
- 플랫폼에서 센서를 사용할 수 있는지 감지할 수 있습니다.
- 센서 판독값에는 정밀도가 높은 타임스탬프가 있어 애플리케이션의 다른 활동과 더 잘 동기화할 수 있습니다.
- 센서 데이터 모델과 좌표계가 명확하게 정의되어 있어 브라우저 공급업체가 상호 운용 가능한 솔루션을 구현할 수 있습니다.
- 일반 센서 기반 인터페이스는 DOM에 바인딩되지 않으므로 (
navigator도window객체도 아님) 서비스 워커 내에서 API를 사용하거나 삽입된 기기 등 헤드리스 JavaScript 런타임에서 API를 구현할 수 있는 미래의 기회가 열립니다. - 보안 및 개인 정보 보호 측면은 일반 센서 API의 최우선 과제이며 이전 센서 API에 비해 훨씬 나은 보안을 제공합니다. 권한 API와 통합됩니다.
Accelerometer,Gyroscope,LinearAccelerationSensor,AbsoluteOrientationSensor,RelativeOrientationSensor,Magnetometer의 경우 화면 좌표와의 자동 동기화가 지원됩니다.
사용 가능한 일반 센서 API
이 글을 쓰는 시점에는 실험해 볼 수 있는 센서가 여러 개 있습니다.
움직임 감지 센서:
AccelerometerGyroscopeLinearAccelerationSensorAbsoluteOrientationSensorRelativeOrientationSensorGravitySensor
환경 센서:
AmbientLightSensor(Chromium의#enable-generic-sensor-extra-classes플래그 뒤에 있음)Magnetometer(Chromium의#enable-generic-sensor-extra-classes플래그 뒤에 있음)
기능 감지
브라우저가 해당 인터페이스를 지원하는지 및 기기에 해당 센서가 있는지 모두 감지해야 하므로 하드웨어 API의 기능 감지는 까다롭습니다. 브라우저가 인터페이스를 지원하는지 확인하는 것은 간단합니다. (Accelerometer을 위에 언급된 다른 인터페이스 중 하나로 바꿉니다.)
if ('Accelerometer' in window) {
// The `Accelerometer` interface is supported by the browser.
// Does the device have an accelerometer, though?
}
실제로 의미 있는 기능 감지 결과를 얻으려면 센서에도 연결해야 합니다. 이 예에서는 이 작업을 수행하는 방법을 보여줍니다.
let accelerometer = null;
try {
accelerometer = new Accelerometer({ frequency: 10 });
accelerometer.onerror = (event) => {
// Handle runtime errors.
if (event.error.name === 'NotAllowedError') {
console.log('Permission to access sensor was denied.');
} else if (event.error.name === 'NotReadableError') {
console.log('Cannot connect to the sensor.');
}
};
accelerometer.onreading = (e) => {
console.log(e);
};
accelerometer.start();
} catch (error) {
// Handle construction errors.
if (error.name === 'SecurityError') {
console.log('Sensor construction was blocked by the Permissions Policy.');
} else if (error.name === 'ReferenceError') {
console.log('Sensor is not supported by the User Agent.');
} else {
throw error;
}
}
폴리필
일반 센서 API를 지원하지 않는 브라우저의 경우 폴리필을 사용할 수 있습니다. 폴리필을 사용하면 관련 센서의 구현만 로드할 수 있습니다.
// Import the objects you need.
import { Gyroscope, AbsoluteOrientationSensor } from './src/motion-sensors.js';
// And they're ready for use!
const gyroscope = new Gyroscope({ frequency: 15 });
const orientation = new AbsoluteOrientationSensor({ frequency: 60 });
이러한 센서는 무엇인가요? 어떻게 사용할 수 있나요?
센서는 간단한 소개가 필요할 수 있는 영역입니다. 센서에 익숙하다면 실습 코딩 섹션으로 바로 이동하세요. 그렇지 않으면 지원되는 각 센서를 자세히 살펴보겠습니다.
가속도계 및 선형 가속 센서
Accelerometer 센서는 3개 축 (X, Y, Z)에서 센서를 호스팅하는 기기의 가속도를 측정합니다. 이 센서는 관성 센서입니다.즉, 기기가 선형 자유 낙하 상태일 때 측정된 총 가속도는 0m/s2이고, 기기가 테이블에 평평하게 놓여 있을 때 위쪽 방향 (Z축)의 가속도는 지구의 중력과 같습니다. 즉, 기기를 위로 밀어 올리는 테이블의 힘을 측정하므로 g ≈ +9.8m/s2입니다. 기기를 오른쪽으로 밀면 X축의 가속도는 양수가 되고, 기기를 오른쪽에서 왼쪽으로 가속하면 음수가 됩니다.
가속도계는 걸음 수 계산, 동작 감지, 간단한 기기 방향과 같은 용도로 사용할 수 있습니다. 가속도계 측정값은 방향 센서와 같은 융합 센서를 만들기 위해 다른 소스의 데이터와 결합되는 경우가 많습니다.
LinearAccelerationSensor은 중력의 기여도를 제외하고 센서를 호스팅하는 기기에 적용되는 가속도를 측정합니다. 기기가 대기 상태일 때(예: 테이블에 평평하게 놓여 있음) 센서는 세 축에서 ≈ 0m/s2 가속도를 측정합니다.
중력 센서
사용자는 이미 Accelerometer 및 LinearAccelerometer 판독값을 수동으로 검사하여 중력 센서의 판독값에 가까운 판독값을 수동으로 도출할 수 있지만, 이는 번거로울 수 있으며 이러한 센서에서 제공하는 값의 정확도에 따라 달라질 수 있습니다. Android와 같은 플랫폼은 운영체제의 일부로 중력 판독값을 제공할 수 있으며, 이는 계산 측면에서 더 저렴하고, 사용자의 하드웨어에 따라 더 정확한 값을 제공하며, API 인체 공학 측면에서 사용하기 더 쉽습니다. GravitySensor는 중력으로 인한 기기의 X, Y, Z축을 따라 발생하는 가속 효과를 반환합니다.
자이로스코프
Gyroscope 센서는 기기의 로컬 X, Y, Z 축을 기준으로 초당 라디안 단위의 각속도를 측정합니다. 대부분의 소비자 기기에는 관성 코리올리 힘을 기반으로 회전율을 측정하는 관성 센서인 기계식 (MEMS) 자이로스코프가 있습니다. MEMS 자이로스코프는 센서의 중력 감도로 인해 센서의 내부 기계 시스템이 변형되어 발생하는 드리프트가 발생하기 쉽습니다. 자이로스코프는 비교적 높은 주파수에서 진동합니다(예: 따라서 다른 센서에 비해 전력을 더 많이 소비할 수 있습니다.
방향 센서
AbsoluteOrientationSensor은 지구의 좌표계와 관련된 기기의 회전을 측정하는 융합 센서이고 RelativeOrientationSensor은 움직임 센서를 호스팅하는 기기의 회전을 정지된 참조 좌표계와 관련하여 나타내는 데이터를 제공합니다.
모든 최신 3D JavaScript 프레임워크는 쿼터니언과 회전 행렬을 지원하여 회전을 나타냅니다. 하지만 WebGL을 직접 사용하는 경우 OrientationSensor에는 quaternion 속성과 populateMatrix() 메서드가 모두 편리하게 있습니다.
다음은 몇 가지 스니펫입니다.
let torusGeometry = new THREE.TorusGeometry(7, 1.6, 4, 3, 6.3);
let material = new THREE.MeshBasicMaterial({ color: 0x0071c5 });
let torus = new THREE.Mesh(torusGeometry, material);
scene.add(torus);
// Update mesh rotation using quaternion.
const sensorAbs = new AbsoluteOrientationSensor();
sensorAbs.onreading = () => torus.quaternion.fromArray(sensorAbs.quaternion);
sensorAbs.start();
// Update mesh rotation using rotation matrix.
const sensorRel = new RelativeOrientationSensor();
let rotationMatrix = new Float32Array(16);
sensor_rel.onreading = () => {
sensorRel.populateMatrix(rotationMatrix);
torus.matrix.fromArray(rotationMatrix);
};
sensorRel.start();
const mesh = new BABYLON.Mesh.CreateCylinder('mesh', 0.9, 0.3, 0.6, 9, 1, scene);
const sensorRel = new RelativeOrientationSensor({ frequency: 30 });
sensorRel.onreading = () => mesh.rotationQuaternion.FromArray(sensorRel.quaternion);
sensorRel.start();
// Initialize sensor and update model matrix when new reading is available.
let modMatrix = new Float32Array([1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1]);
const sensorAbs = new AbsoluteOrientationSensor({ frequency: 60 });
sensorAbs.onreading = () => sensorAbs.populateMatrix(modMatrix);
sensorAbs.start();
// Somewhere in rendering code, update vertex shader attribute for the model
gl.uniformMatrix4fv(modMatrixAttr, false, modMatrix);
방향 센서는 몰입형 게임, 증강 현실, 가상 현실과 같은 다양한 사용 사례를 지원합니다.
움직임 감지 센서, 고급 사용 사례, 요구사항에 관한 자세한 내용은 움직임 감지 센서 설명 문서를 참고하세요.
화면 좌표와 동기화
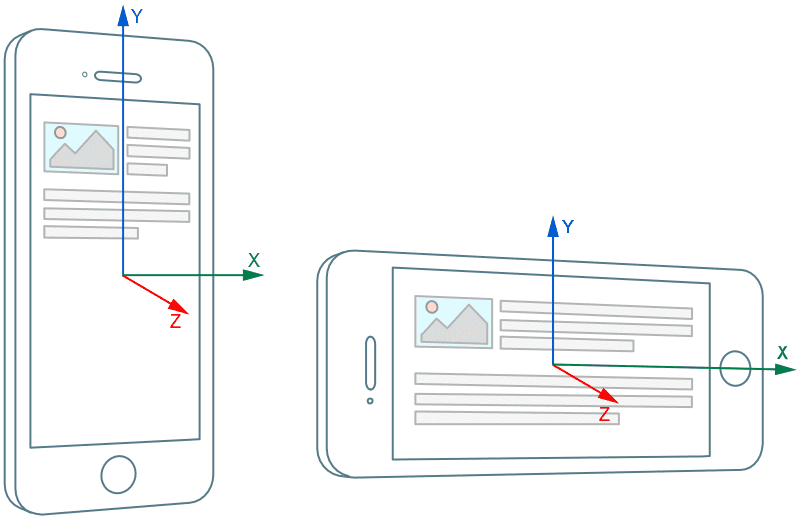
기본적으로 공간 센서 판독값은 기기에 바인드되고 화면 방향을 고려하지 않는 로컬 좌표계에서 확인됩니다.
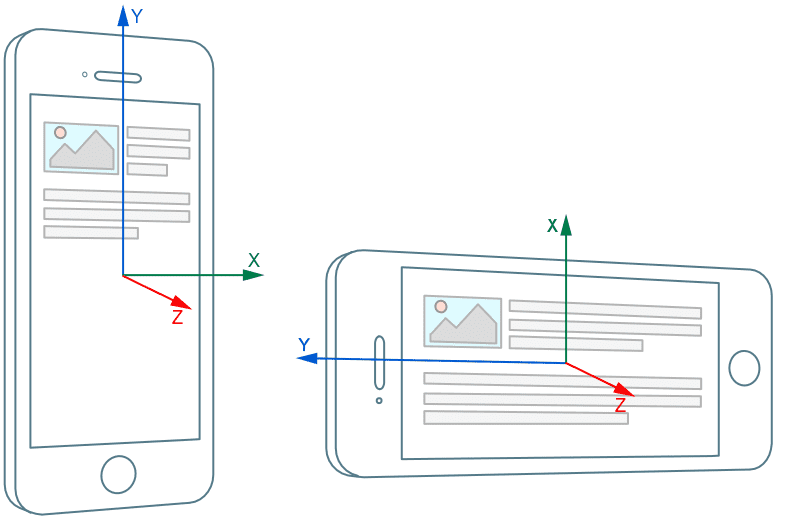
하지만 게임이나 증강 현실, 가상 현실과 같은 많은 사용 사례에서는 센서 판독값이 화면 방향에 바인딩된 좌표계에서 해결되어야 합니다.
이전에는 센서 판독값을 화면 좌표에 매핑하는 작업을 JavaScript로 구현해야 했습니다. 이 접근 방식은 비효율적이며 웹 애플리케이션 코드의 복잡성도 상당히 증가합니다. 웹 애플리케이션은 화면 방향 변경을 모니터링하고 센서 판독값의 좌표 변환을 실행해야 하는데, 이는 오일러 각도나 사원수에는 간단한 작업이 아닙니다.
일반 센서 API는 훨씬 간단하고 안정적인 솔루션을 제공합니다. 로컬 좌표 시스템은 정의된 모든 공간 센서 클래스(Accelerometer, Gyroscope, LinearAccelerationSensor, AbsoluteOrientationSensor, RelativeOrientationSensor, Magnetometer)에 대해 구성할 수 있습니다. referenceFrame 옵션을 센서 객체 생성자에 전달하면 사용자는 반환된 판독값이 기기 또는 화면 좌표로 확인되는지 정의합니다.
// Sensor readings are resolved in the Device coordinate system by default.
// Alternatively, could be RelativeOrientationSensor({referenceFrame: "device"}).
const sensorRelDevice = new RelativeOrientationSensor();
// Sensor readings are resolved in the Screen coordinate system. No manual remapping is required!
const sensorRelScreen = new RelativeOrientationSensor({ referenceFrame: 'screen' });
코딩을 시작해 보겠습니다.
일반 센서 API는 매우 간단하고 사용하기 쉽습니다. 센서 인터페이스에는 센서 상태를 제어하는 start() 및 stop() 메서드와 센서 활성화, 오류, 새로 사용 가능한 판독값에 관한 알림을 수신하는 여러 이벤트 핸들러가 있습니다. 구체적인 센서 클래스는 일반적으로 기본 클래스에 특정 읽기 속성을 추가합니다.
개발 환경
개발 중에 localhost를 통해 센서를 사용할 수 있습니다. 휴대기기용으로 개발하는 경우 로컬 서버에 포트 전달을 설정하면 됩니다.
코드가 준비되면 HTTPS를 지원하는 서버에 배포합니다. GitHub Pages는 HTTPS를 통해 제공되므로 데모를 공유하기에 적합합니다.
3D 모델 회전
이 간단한 예에서는 절대 방향 센서의 데이터를 사용하여 3D 모델의 회전 쿼터니언을 수정합니다. model는 quaternion 속성이 있는 three.js Object3D 클래스 인스턴스입니다. orientation phone 데모의 다음 코드 스니펫은 절대 방향 센서를 사용하여 3D 모델을 회전하는 방법을 보여줍니다.
function initSensor() {
sensor = new AbsoluteOrientationSensor({ frequency: 60 });
sensor.onreading = () => model.quaternion.fromArray(sensor.quaternion);
sensor.onerror = (event) => {
if (event.error.name == 'NotReadableError') {
console.log('Sensor is not available.');
}
};
sensor.start();
}
기기의 방향이 WebGL 장면 내 3D model 회전에 반영됩니다.

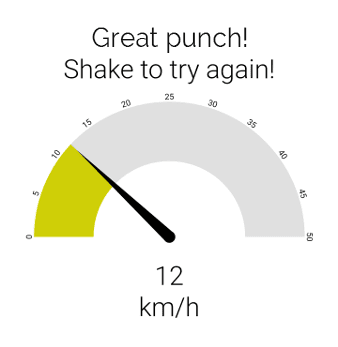
펀치미터
다음 코드 스니펫은 펀치미터 데모에서 추출한 것으로, 선형 가속도 센서를 사용하여 기기가 처음에 정지해 있다고 가정할 때 기기의 최대 속도를 계산하는 방법을 보여줍니다.
this.maxSpeed = 0;
this.vx = 0;
this.ax = 0;
this.t = 0;
/* … */
this.accel.onreading = () => {
let dt = (this.accel.timestamp - this.t) * 0.001; // In seconds.
this.vx += ((this.accel.x + this.ax) / 2) * dt;
let speed = Math.abs(this.vx);
if (this.maxSpeed < speed) {
this.maxSpeed = speed;
}
this.t = this.accel.timestamp;
this.ax = this.accel.x;
};
현재 속도는 가속도 함수의 적분에 대한 근사치로 계산됩니다.
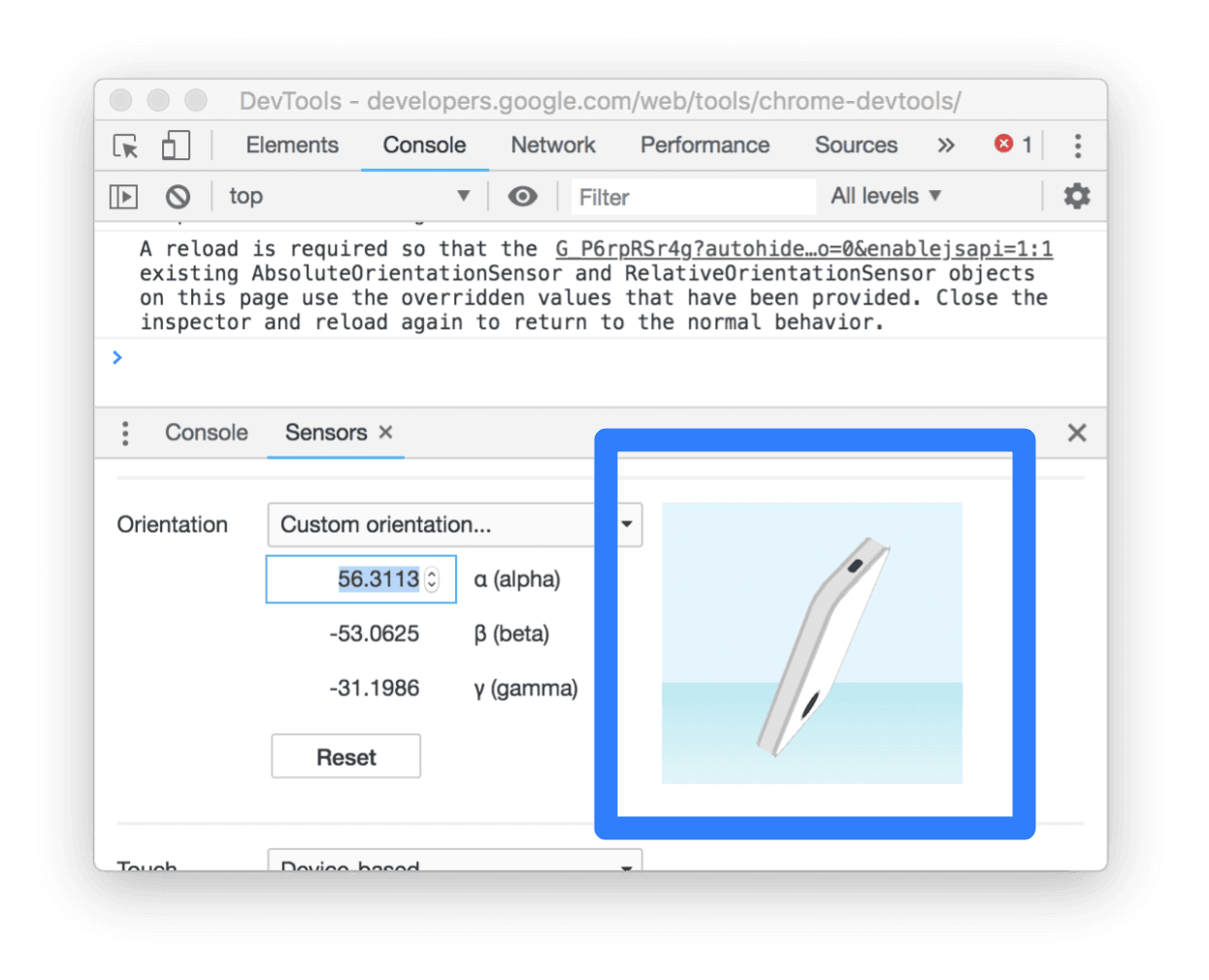
Chrome DevTools를 사용한 디버깅 및 센서 재정의
일부 경우에는 일반 센서 API를 사용하기 위해 실제 기기가 필요하지 않습니다. Chrome DevTools는 기기 방향 시뮬레이션을 잘 지원합니다.
개인 정보 보호 및 보안
센서 측정값은 악성 웹페이지의 다양한 공격에 취약한 민감한 데이터입니다. 일반 센서 API 구현은 가능한 보안 및 개인 정보 보호 위험을 완화하기 위해 몇 가지 제한을 적용합니다. API를 사용하려는 개발자는 이러한 제한사항을 고려해야 하므로 간단히 나열해 보겠습니다.
HTTPS만
일반 센서 API는 강력한 기능이므로 브라우저는 보안 컨텍스트에서만 허용합니다. 실제로 이는 일반 센서 API를 사용하려면 HTTPS를 통해 페이지에 액세스해야 함을 의미합니다. 개발 중에는 http://localhost를 통해 이 작업을 실행할 수 있지만 프로덕션에서는 서버에 HTTPS가 있어야 합니다. 권장사항 및 가이드라인은 안전하고 보안이 유지되는 컬렉션을 참고하세요.
권한 정책 통합
일반 센서 API의 권한 정책 통합은 프레임의 센서 데이터에 대한 액세스를 제어합니다.
기본적으로 Sensor 객체는 기본 프레임 또는 동일 출처 하위 프레임 내에서만 생성할 수 있으므로 승인되지 않은 센서 데이터의 교차 출처 iframe 읽기가 방지됩니다. 이 기본 동작은 해당 정책 제어 기능을 명시적으로 사용 설정하거나 사용 중지하여 수정할 수 있습니다.
아래 스니펫은 교차 출처 iframe에 가속도계 데이터 액세스 권한을 부여하는 방법을 보여줍니다. 이제 Accelerometer 또는 LinearAccelerationSensor 객체를 만들 수 있습니다.
<iframe src="https://third-party.com" allow="accelerometer" />
센서 판독값 전송이 일시중지될 수 있음
센서 판독값은 사용자에게 표시되는 웹페이지에서만 액세스할 수 있습니다. 즉, 사용자가 실제로 웹페이지와 상호작용하는 경우에만 액세스할 수 있습니다. 또한 사용자의 포커스가 교차 출처 하위 프레임으로 변경되면 센서 데이터가 상위 프레임에 제공되지 않습니다. 이렇게 하면 상위 프레임에서 사용자 입력을 추론하지 않습니다.
다음 단계
주변광 센서나 근접 센서와 같이 가까운 시일 내에 구현될 이미 지정된 센서 클래스 집합이 있습니다. 하지만 일반 센서 프레임워크의 뛰어난 확장성 덕분에 다양한 센서 유형을 나타내는 훨씬 더 많은 새 클래스가 등장할 것으로 예상됩니다.
향후 작업의 또 다른 중요한 영역은 일반 센서 API 자체를 개선하는 것입니다. 일반 센서 사양은 현재 후보 권장사항이므로 개발자가 필요로 하는 수정사항을 적용하고 새로운 기능을 도입할 시간이 아직 있습니다.
여러분도 도움을 주실 수 있습니다.
센서 사양이 후보 추천 성숙도 수준에 도달했으므로 웹 및 브라우저 개발자의 의견을 적극적으로 수렴하고 있습니다. 추가하면 좋을 기능이나 현재 API에서 수정하고 싶은 부분이 있다면 알려주세요.
Chrome 구현에 관한 사양 문제와 버그도 자유롭게 신고해 주세요.
리소스
- 데모 프로젝트: https://w3c.github.io/generic-sensor-demos/
- 일반 센서 API 사양: https://w3c.github.io/sensors/
- 사양 문제: https://github.com/w3c/sensors/issues
- W3C 작업 그룹 메일링 리스트: public-device-apis@w3.org
- Chrome 기능 상태: https://www.chromestatus.com/feature/5698781827825664
- 구현 버그: http://crbug.com?q=component:Blink>Sensor