
Mit der Generic Sensor API können Sie auf Gerätesensoren wie Beschleunigungsmesser, Gyroskope und Magnetometer zugreifen.


Sensordaten werden heute in vielen plattformspezifischen Anwendungen verwendet, um Anwendungsfälle wie immersives Gaming, Fitnesstracking und Augmented oder Virtual Reality zu ermöglichen. Wäre es nicht toll, die Lücke zwischen plattformspezifischen und Webanwendungen zu schließen? Die Generic Sensor API für das Web!
Was ist die Generic Sensor API?
Die Generic Sensor API ist eine Reihe von Schnittstellen, die Sensoren für die Webplattform verfügbar machen. Die API besteht aus der Basis-Sensor-Schnittstelle und einer Reihe konkreter Sensor-Klassen, die darauf aufbauen. Eine Basisschnittstelle vereinfacht die Implementierung und Spezifikation der konkreten Sensorklassen. Ein Beispiel ist die Klasse Gyroscope. Es ist superklein! Die Kernfunktionen werden durch die Basisschnittstelle angegeben und Gyroscope erweitert sie lediglich um drei Attribute, die die Winkelgeschwindigkeit darstellen.
Einige Sensorklassen sind mit tatsächlichen Hardwaresensoren verbunden, z. B. mit dem Beschleunigungsmesser oder dem Gyroskop. Diese werden als Low-Level-Sensoren bezeichnet. Andere Sensoren, die als Fusionssensoren bezeichnet werden, führen Daten aus mehreren Low-Level-Sensoren zusammen, um Informationen bereitzustellen, die ein Skript andernfalls berechnen müsste. Der Sensor AbsoluteOrientation stellt beispielsweise eine gebrauchsfertige 4×4-Rotationsmatrix basierend auf den Daten des Beschleunigungsmessers, des Gyroskops und des Magnetometers bereit.
Sie denken vielleicht, dass die Webplattform bereits Sensordaten bereitstellt, und das stimmt auch. Die Ereignisse DeviceMotion und DeviceOrientation enthalten beispielsweise Daten des Bewegungssensors. Warum brauchen wir also eine neue API?
Im Vergleich zu den vorhandenen Schnittstellen bietet die Generic Sensor API eine Reihe von Vorteilen:
- Die Generic Sensor API ist ein Sensor-Framework, das einfach mit neuen Sensor-Klassen erweitert werden kann. Jede dieser Klassen behält die generische Schnittstelle bei. Der Clientcode, der für einen Sensortyp geschrieben wurde, kann mit nur sehr wenigen Änderungen für einen anderen Sensortyp wiederverwendet werden.
- Sie können den Sensor konfigurieren. Sie können beispielsweise die für Ihre Anwendung geeignete Stichprobenhäufigkeit festlegen.
- Sie können erkennen, ob ein Sensor auf der Plattform verfügbar ist.
- Sensorwerte haben hochpräzise Zeitstempel, die eine bessere Synchronisierung mit anderen Aktivitäten in Ihrer Anwendung ermöglichen.
- Sensordatenmodelle und Koordinatensysteme sind klar definiert, sodass Browseranbieter interoperable Lösungen implementieren können.
- Die auf dem Generic Sensor basierenden Schnittstellen sind nicht an das DOM gebunden (d. h. sie sind weder
navigator- nochwindow-Objekte). Das eröffnet zukünftige Möglichkeiten, die API in Service Workern zu verwenden oder sie in Headless-JavaScript-Laufzeitumgebungen wie eingebetteten Geräten zu implementieren. - Sicherheits- und Datenschutzaspekte haben bei der Generic Sensor API oberste Priorität. Sie bietet im Vergleich zu älteren Sensor-APIs eine deutlich höhere Sicherheit. Es gibt eine Integration mit der Permissions API.
- Die automatische Synchronisierung mit Bildschirmkoordinaten ist für
Accelerometer,Gyroscope,LinearAccelerationSensor,AbsoluteOrientationSensor,RelativeOrientationSensorundMagnetometerverfügbar.
Verfügbare generische Sensor-APIs
Zum Zeitpunkt der Erstellung dieses Dokuments gibt es mehrere Sensoren, mit denen Sie experimentieren können.
Bewegungssensoren:
AccelerometerGyroscopeLinearAccelerationSensorAbsoluteOrientationSensorRelativeOrientationSensorGravitySensor
Umgebungssensoren:
AmbientLightSensor(Hinter dem Flag#enable-generic-sensor-extra-classesin Chromium.)Magnetometer(Hinter dem Flag#enable-generic-sensor-extra-classesin Chromium.)
Funktionserkennung
Die Funktionserkennung von Hardware-APIs ist schwierig, da Sie sowohl erkennen müssen, ob der Browser die betreffende Schnittstelle unterstützt, als auch, ob das Gerät den entsprechenden Sensor hat. Es ist ganz einfach, zu prüfen, ob der Browser eine Schnittstelle unterstützt. Ersetzen Sie Accelerometer durch eine der anderen oben genannten Schnittstellen.
if ('Accelerometer' in window) {
// The `Accelerometer` interface is supported by the browser.
// Does the device have an accelerometer, though?
}
Damit die Erkennung von Funktionen wirklich aussagekräftig ist, müssen Sie auch versuchen, eine Verbindung zum Sensor herzustellen. In diesem Beispiel wird gezeigt, wie das geht.
let accelerometer = null;
try {
accelerometer = new Accelerometer({ frequency: 10 });
accelerometer.onerror = (event) => {
// Handle runtime errors.
if (event.error.name === 'NotAllowedError') {
console.log('Permission to access sensor was denied.');
} else if (event.error.name === 'NotReadableError') {
console.log('Cannot connect to the sensor.');
}
};
accelerometer.onreading = (e) => {
console.log(e);
};
accelerometer.start();
} catch (error) {
// Handle construction errors.
if (error.name === 'SecurityError') {
console.log('Sensor construction was blocked by the Permissions Policy.');
} else if (error.name === 'ReferenceError') {
console.log('Sensor is not supported by the User Agent.');
} else {
throw error;
}
}
Polyfill
Für Browser, die die Generic Sensor API nicht unterstützen, ist ein Polyfill verfügbar. Mit dem Polyfill können Sie nur die Implementierungen der relevanten Sensoren laden.
// Import the objects you need.
import { Gyroscope, AbsoluteOrientationSensor } from './src/motion-sensors.js';
// And they're ready for use!
const gyroscope = new Gyroscope({ frequency: 15 });
const orientation = new AbsoluteOrientationSensor({ frequency: 60 });
Was sind das für Sensoren? Wie kann ich sie verwenden?
Sensoren sind ein Bereich, der möglicherweise eine kurze Einführung erfordert. Wenn Sie mit Sensoren vertraut sind, können Sie direkt zum praktischen Programmierabschnitt springen. Andernfalls sehen wir uns jeden unterstützten Sensor genauer an.
Beschleunigungsmesser und Sensor für lineare Beschleunigung
Der Sensor Accelerometer misst die Beschleunigung eines Geräts, auf dem sich der Sensor befindet, auf drei Achsen (X, Y und Z). Dieser Sensor ist ein Trägheitssensor. Das bedeutet, dass die gemessene Gesamtbeschleunigung 0 m/s2 beträgt, wenn sich das Gerät im freien Fall befindet. Wenn ein Gerät flach auf einem Tisch liegt, entspricht die Beschleunigung in Aufwärtsrichtung (Z-Achse) der Erdbeschleunigung, d. h. g ≈ +9,8 m/s2, da die Kraft des Tisches gemessen wird, die das Gerät nach oben drückt. Wenn Sie das Gerät nach rechts bewegen, ist die Beschleunigung auf der X-Achse positiv. Wenn Sie das Gerät von rechts nach links bewegen, ist sie negativ.
Beschleunigungsmesser können für Dinge wie Schrittzählung, Bewegungserkennung oder einfache Geräteausrichtung verwendet werden. Häufig werden Beschleunigungsmessungen mit Daten aus anderen Quellen kombiniert, um Fusionssensoren wie Orientierungssensoren zu erstellen.
Der LinearAccelerationSensor misst die Beschleunigung, die auf das Gerät mit dem Sensor wirkt, ohne den Beitrag der Schwerkraft. Wenn ein Gerät in Ruhe ist, z. B. flach auf dem Tisch liegt, würde der Sensor auf drei Achsen eine Beschleunigung von ≈ 0 m/s2 messen.
Schwerkraftsensor
Nutzer können bereits jetzt manuell Messwerte ableiten, die denen eines Schwerkraftsensors ähneln, indem sie die Messwerte von Accelerometer und LinearAccelerometer manuell prüfen. Das kann jedoch umständlich sein und hängt von der Genauigkeit der von diesen Sensoren bereitgestellten Werte ab. Plattformen wie Android können Schwerkraftmessungen als Teil des Betriebssystems bereitstellen. Das sollte in Bezug auf die Berechnung günstiger sein, je nach Hardware des Nutzers genauere Werte liefern und in Bezug auf die API-Ergonomie einfacher zu verwenden sein. Der GravitySensor-Sensor gibt die Auswirkungen der Beschleunigung entlang der X-, Y- und Z-Achse des Geräts aufgrund der Schwerkraft zurück.
Gyroskop
Der Sensor Gyroscope misst die Winkelgeschwindigkeit in Radian pro Sekunde um die lokalen X-, Y- und Z-Achsen des Geräts. Die meisten Geräte für Endnutzer haben mechanische (MEMS)-Gyroskope, die Trägheitssensoren sind, die die Drehrate auf Grundlage der Trägheits-Corioliskraft messen. MEMS-Gyroskope sind anfällig für Drift, die durch die Gravitationssensitivität des Sensors verursacht wird. Dadurch wird das interne mechanische System des Sensors verformt. Gyroskope schwingen mit relativ hohen Frequenzen, z.B. 10 kHz und verbrauchen daher möglicherweise mehr Strom als andere Sensoren.
Ausrichtungssensoren
Der AbsoluteOrientationSensor ist ein Fusionssensor, der die Drehung eines Geräts in Bezug auf das Koordinatensystem der Erde misst. Der RelativeOrientationSensor liefert Daten, die die Drehung eines Geräts mit Bewegungssensoren in Bezug auf ein stationäres Referenzkoordinatensystem darstellen.
Alle modernen 3D-JavaScript-Frameworks unterstützen Quaternionen und Rotationsmatrizen zur Darstellung von Drehungen. Wenn Sie WebGL jedoch direkt verwenden, hat OrientationSensor sowohl eine quaternion-Eigenschaft als auch eine populateMatrix()-Methode.
Hier sind einige Beispiele:
let torusGeometry = new THREE.TorusGeometry(7, 1.6, 4, 3, 6.3);
let material = new THREE.MeshBasicMaterial({ color: 0x0071c5 });
let torus = new THREE.Mesh(torusGeometry, material);
scene.add(torus);
// Update mesh rotation using quaternion.
const sensorAbs = new AbsoluteOrientationSensor();
sensorAbs.onreading = () => torus.quaternion.fromArray(sensorAbs.quaternion);
sensorAbs.start();
// Update mesh rotation using rotation matrix.
const sensorRel = new RelativeOrientationSensor();
let rotationMatrix = new Float32Array(16);
sensor_rel.onreading = () => {
sensorRel.populateMatrix(rotationMatrix);
torus.matrix.fromArray(rotationMatrix);
};
sensorRel.start();
const mesh = new BABYLON.Mesh.CreateCylinder('mesh', 0.9, 0.3, 0.6, 9, 1, scene);
const sensorRel = new RelativeOrientationSensor({ frequency: 30 });
sensorRel.onreading = () => mesh.rotationQuaternion.FromArray(sensorRel.quaternion);
sensorRel.start();
// Initialize sensor and update model matrix when new reading is available.
let modMatrix = new Float32Array([1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1]);
const sensorAbs = new AbsoluteOrientationSensor({ frequency: 60 });
sensorAbs.onreading = () => sensorAbs.populateMatrix(modMatrix);
sensorAbs.start();
// Somewhere in rendering code, update vertex shader attribute for the model
gl.uniformMatrix4fv(modMatrixAttr, false, modMatrix);
Orientierungssensoren ermöglichen verschiedene Anwendungsfälle wie immersive Spiele, Augmented Reality und Virtual Reality.
Weitere Informationen zu Bewegungssensoren, erweiterten Anwendungsfällen und Anforderungen finden Sie im Dokument zu Bewegungssensoren.
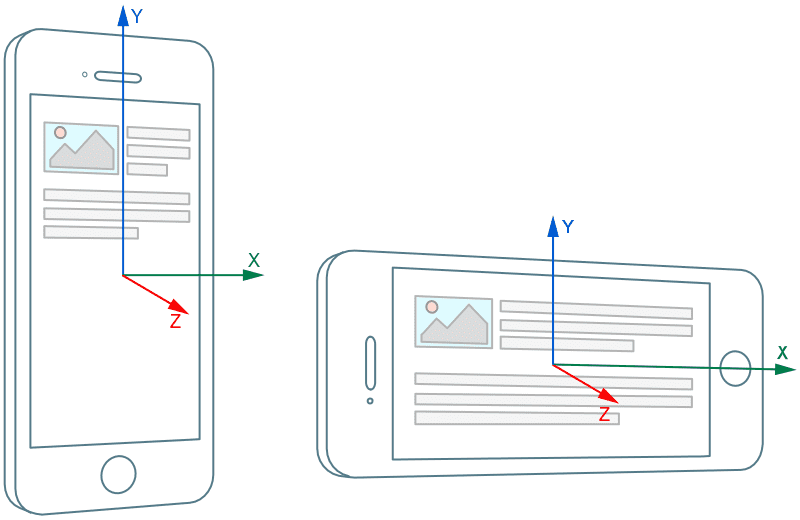
Synchronisierung mit Bildschirmkoordinaten
Standardmäßig werden die Messwerte von räumlichen Sensoren in einem lokalen Koordinatensystem aufgelöst, das an das Gerät gebunden ist und die Bildschirmausrichtung nicht berücksichtigt.
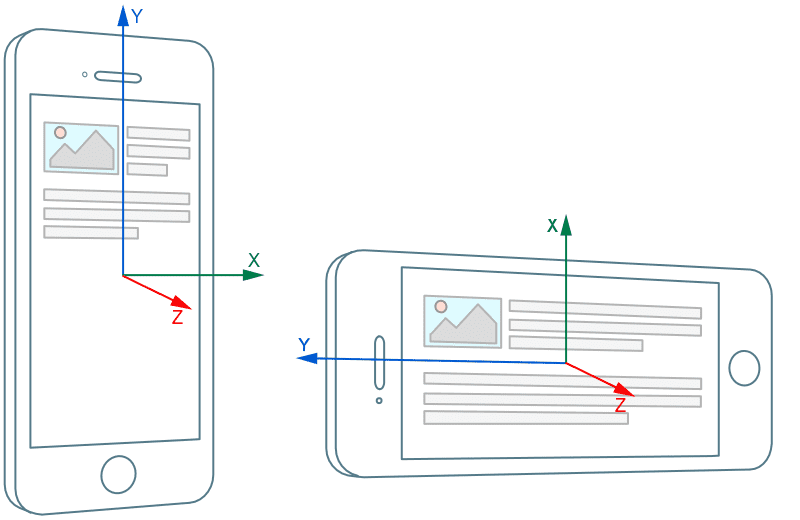
Viele Anwendungsfälle wie Spiele oder Augmented und Virtual Reality erfordern jedoch, dass Sensorwerte in einem Koordinatensystem aufgelöst werden, das stattdessen an die Bildschirmausrichtung gebunden ist.
Bisher musste die Neuzuordnung von Sensormesswerten zu Bildschirmkoordinaten in JavaScript implementiert werden. Dieser Ansatz ist ineffizient und erhöht die Komplexität des Webanwendungscodes erheblich. Die Webanwendung muss Änderungen der Bildschirmausrichtung beobachten und Koordinatentransformationen für Sensormesswerte durchführen, was für Euler-Winkel oder Quaternionen nicht trivial ist.
Die Generic Sensor API bietet eine viel einfachere und zuverlässigere Lösung. Das lokale Koordinatensystem ist für alle definierten räumlichen Sensorklassen konfigurierbar: Accelerometer, Gyroscope, LinearAccelerationSensor, AbsoluteOrientationSensor, RelativeOrientationSensor und Magnetometer. Durch Übergeben der Option referenceFrame an den Konstruktor des Sensorobjekts legt der Nutzer fest, ob die zurückgegebenen Messwerte in Geräte- oder Bildschirm-Koordinaten aufgelöst werden.
// Sensor readings are resolved in the Device coordinate system by default.
// Alternatively, could be RelativeOrientationSensor({referenceFrame: "device"}).
const sensorRelDevice = new RelativeOrientationSensor();
// Sensor readings are resolved in the Screen coordinate system. No manual remapping is required!
const sensorRelScreen = new RelativeOrientationSensor({ referenceFrame: 'screen' });
Los gehts!
Die Generic Sensor API ist sehr einfach und benutzerfreundlich. Die Sensorschnittstelle hat die Methoden start() und stop() zum Steuern des Sensorstatus sowie mehrere Ereignishandler zum Empfangen von Benachrichtigungen über die Sensoraktivierung, Fehler und neu verfügbare Messwerte. Die konkreten Sensor-Klassen fügen der Basisklasse in der Regel ihre spezifischen Leseattribute hinzu.
Entwicklungsumgebung
Während der Entwicklung können Sie Sensoren über localhost verwenden. Wenn Sie für Mobilgeräte entwickeln, richten Sie die Portweiterleitung für Ihren lokalen Server ein.
Wenn Ihr Code fertig ist, stellen Sie ihn auf einem Server bereit, der HTTPS unterstützt. GitHub Pages werden über HTTPS bereitgestellt. Das ist ideal, um Demos zu teilen.
3D-Modell drehen
In diesem einfachen Beispiel verwenden wir die Daten eines Sensors für die absolute Ausrichtung, um den Rotationsquaternion eines 3D-Modells zu ändern. model ist eine Instanz der three.js-Klasse Object3D mit dem Attribut quaternion. Das folgende Code-Snippet aus der Demo orientation phone veranschaulicht, wie der Sensor für die absolute Ausrichtung verwendet werden kann, um ein 3D‑Modell zu drehen.
function initSensor() {
sensor = new AbsoluteOrientationSensor({ frequency: 60 });
sensor.onreading = () => model.quaternion.fromArray(sensor.quaternion);
sensor.onerror = (event) => {
if (event.error.name == 'NotReadableError') {
console.log('Sensor is not available.');
}
};
sensor.start();
}
Die Ausrichtung des Geräts wird in der WebGL-Szene in Form einer 3D-Drehung von model dargestellt.

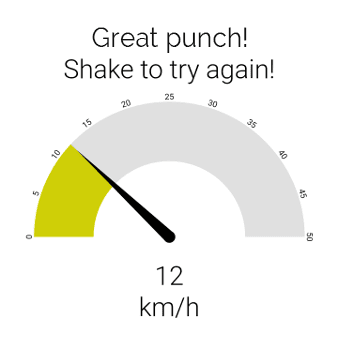
Punchmeter
Das folgende Code-Snippet stammt aus der Punchmeter-Demo und veranschaulicht, wie der Sensor für lineare Beschleunigung verwendet werden kann, um die maximale Geschwindigkeit eines Geräts zu berechnen, wenn davon ausgegangen wird, dass es sich anfangs in Ruhe befindet.
this.maxSpeed = 0;
this.vx = 0;
this.ax = 0;
this.t = 0;
/* … */
this.accel.onreading = () => {
let dt = (this.accel.timestamp - this.t) * 0.001; // In seconds.
this.vx += ((this.accel.x + this.ax) / 2) * dt;
let speed = Math.abs(this.vx);
if (this.maxSpeed < speed) {
this.maxSpeed = speed;
}
this.t = this.accel.timestamp;
this.ax = this.accel.x;
};
Die aktuelle Geschwindigkeit wird als Näherungswert für das Integral der Beschleunigungsfunktion berechnet.
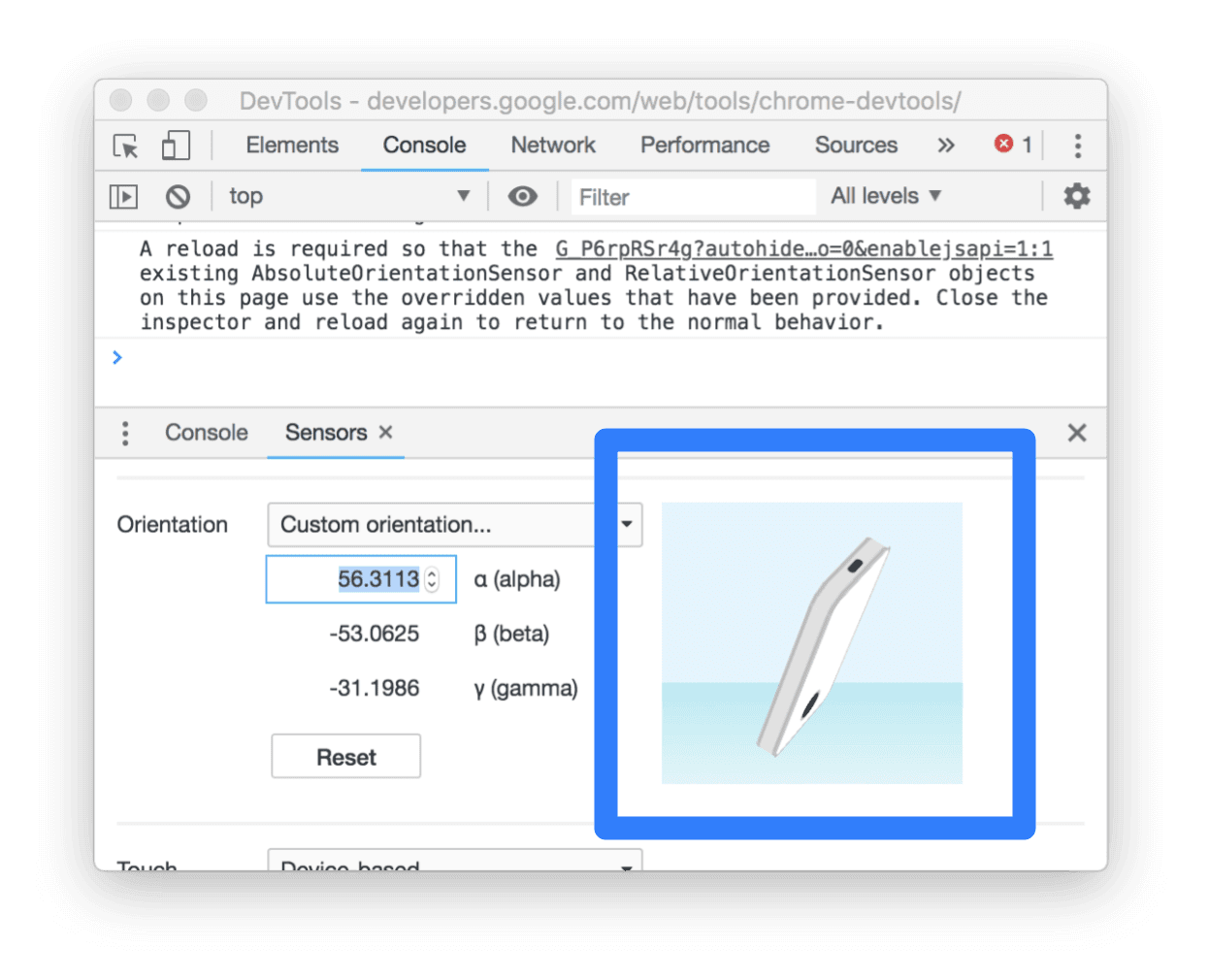
Debugging und Überschreiben von Sensoren mit den Chrome-Entwicklertools
In einigen Fällen benötigen Sie kein physisches Gerät, um die Generic Sensor API zu verwenden. Die Chrome-Entwicklertools bieten eine hervorragende Unterstützung für die Simulation der Geräteausrichtung.
Datenschutz und Sicherheit
Messwerte von Sensoren sind vertrauliche Daten, die verschiedenen Angriffen von schädlichen Webseiten ausgesetzt sein können. Bei Implementierungen von Generic Sensor APIs werden einige Einschränkungen durchgesetzt, um die möglichen Sicherheits- und Datenschutzrisiken zu minimieren. Entwickler, die die API verwenden möchten, müssen diese Einschränkungen berücksichtigen. Daher werden sie hier kurz aufgeführt.
Nur HTTPS
Da die Generic Sensor API eine leistungsstarke Funktion ist, lässt der Browser sie nur in sicheren Kontexten zu. In der Praxis bedeutet das, dass Sie über HTTPS auf Ihre Seite zugreifen müssen, um die Generic Sensor API zu verwenden. Während der Entwicklung können Sie dies über http://localhost tun. Für die Produktion benötigen Sie jedoch HTTPS auf Ihrem Server. Best Practices und Richtlinien finden Sie in der Sammlung Sicher und geschützt.
Integration der Richtlinie für Berechtigungen
Die Berechtigungsrichtlinienintegration in der Generic Sensor API steuert den Zugriff auf Sensordaten für einen Frame.
Standardmäßig können die Sensor-Objekte nur in einem Hauptframe oder in untergeordneten Frames mit demselben Ursprung erstellt werden. Dadurch wird verhindert, dass ursprungsübergreifende iFrames Sensordaten unbefugt lesen. Dieses Standardverhalten kann geändert werden, indem die entsprechenden richtlinienbasierten Funktionen explizit aktiviert oder deaktiviert werden.
Im folgenden Snippet wird gezeigt, wie einem ursprungsübergreifenden iFrame Zugriff auf Beschleunigungsmesserdaten gewährt wird. Das bedeutet, dass dort jetzt Accelerometer- oder LinearAccelerationSensor-Objekte erstellt werden können.
<iframe src="https://third-party.com" allow="accelerometer" />
Die Übermittlung von Sensormessungen kann ausgesetzt werden
Sensorwerte sind nur über eine sichtbare Webseite zugänglich, d.h., wenn der Nutzer tatsächlich mit ihr interagiert. Außerdem würden Sensordaten nicht an den übergeordneten Frame gesendet, wenn der Nutzerfokus auf einen untergeordneten Frame mit unterschiedlicher Herkunft wechselt. So wird verhindert, dass der übergeordnete Frame Benutzereingaben ableitet.
Nächste Schritte
Es gibt eine Reihe von bereits angegebenen Sensor-Klassen, die in naher Zukunft implementiert werden sollen, z. B. Ambient Light Sensor oder Proximity Sensor. Dank der großen Erweiterbarkeit des Generic Sensor-Frameworks können wir jedoch mit dem Erscheinen noch weiterer neuer Klassen rechnen, die verschiedene Sensortypen repräsentieren.
Ein weiterer wichtiger Bereich für zukünftige Arbeiten ist die Verbesserung der Generic Sensor API selbst. Die Generic Sensor-Spezifikation ist derzeit eine Candidate Recommendation. Das bedeutet, dass noch Zeit ist, Fehler zu beheben und neue Funktionen einzuführen, die Entwickler benötigen.
Sie können helfen.
Die Sensorspezifikationen haben die Reifephase Candidate Recommendation erreicht. Daher ist Feedback von Web- und Browserentwicklern sehr willkommen. Lassen Sie uns wissen, welche Funktionen wir hinzufügen sollten oder ob Sie etwas in der aktuellen API ändern möchten.
Sie können auch Spezifikationsprobleme sowie Fehler für die Chrome-Implementierung melden.
Ressourcen
- Demoprojekte: https://w3c.github.io/generic-sensor-demos/
- Generic Sensor API-Spezifikation: https://w3c.github.io/sensors/
- Spezifikationsprobleme: https://github.com/w3c/sensors/issues
- Mailingliste der W3C-Arbeitsgruppe: public-device-apis@w3.org
- Chrome-Funktionsstatus: https://www.chromestatus.com/feature/5698781827825664
- Implementierungsfehler: http://crbug.com?q=component:Blink>Sensor
Danksagungen
Dieser Artikel wurde von Joe Medley und Kayce Basques geprüft.